
Meksika’daki Tecnologico de Monterrey’deki araştırmacılar, kısa bir süre önce çevrimiçi robotik eğitimini geliştirebilecek ve öğretmenlerin dersleri sırasında açıkladıkları teorik kavramları uzaktan göstermelerine olanak tanıyan düşük maliyetli bir robotik kol oluşturdular. Hardware X’te yayınlanan bir makalede sunulan bu robotik kol, tamamen açık kaynaklı ve dünya çapındaki tüm öğretmenler ve eğitimciler tarafından kolayca monte edilebilir.
Araştırmayı yürüten araştırmacılardan Victor H. Benitez, “Bu projeyi, Mart 2020’deki COVID-19 salgını sırasında geliştirilmeye başlandı.” dedi. “Doğrudan ve ters kinematik ve uygulamalarını öğrendikten sonra, iki öğrenci, Rodrigo Symonds ve David Elguezabal, robotik dersleri için bir proje olarak IoT (nesnelerin interneti) yeteneklerine sahip iki bağlantılı bir robotik kol oluşturma fikriyle bana geldi.”
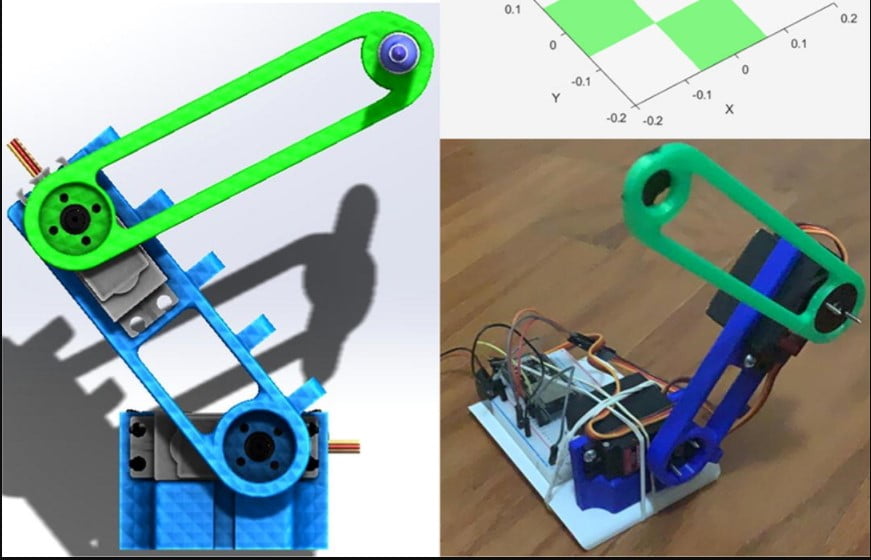
Benitez ve öğrencileri, laboratuvar ortamlarının dışında (yani, gelişmiş araçlara ve ekipmanlara ihtiyaç duymadan) monte edilebilecek. Ancak fiziksel bir ortamda karmaşık robotik konseptlerini sergilemek için kullanılabilecek uygun fiyatlı bir robot oluşturmaya başladı. Bu kavramların bir örneği, robotların hareketlerinin temelini oluşturan matematiksel bir süreç olan kinematiktir; bu süreç, öğrencilere yalnızca teorik olarak açıklandığında (yani herhangi bir fiziksel gösteri olmadan) anlaması zor olabilir.
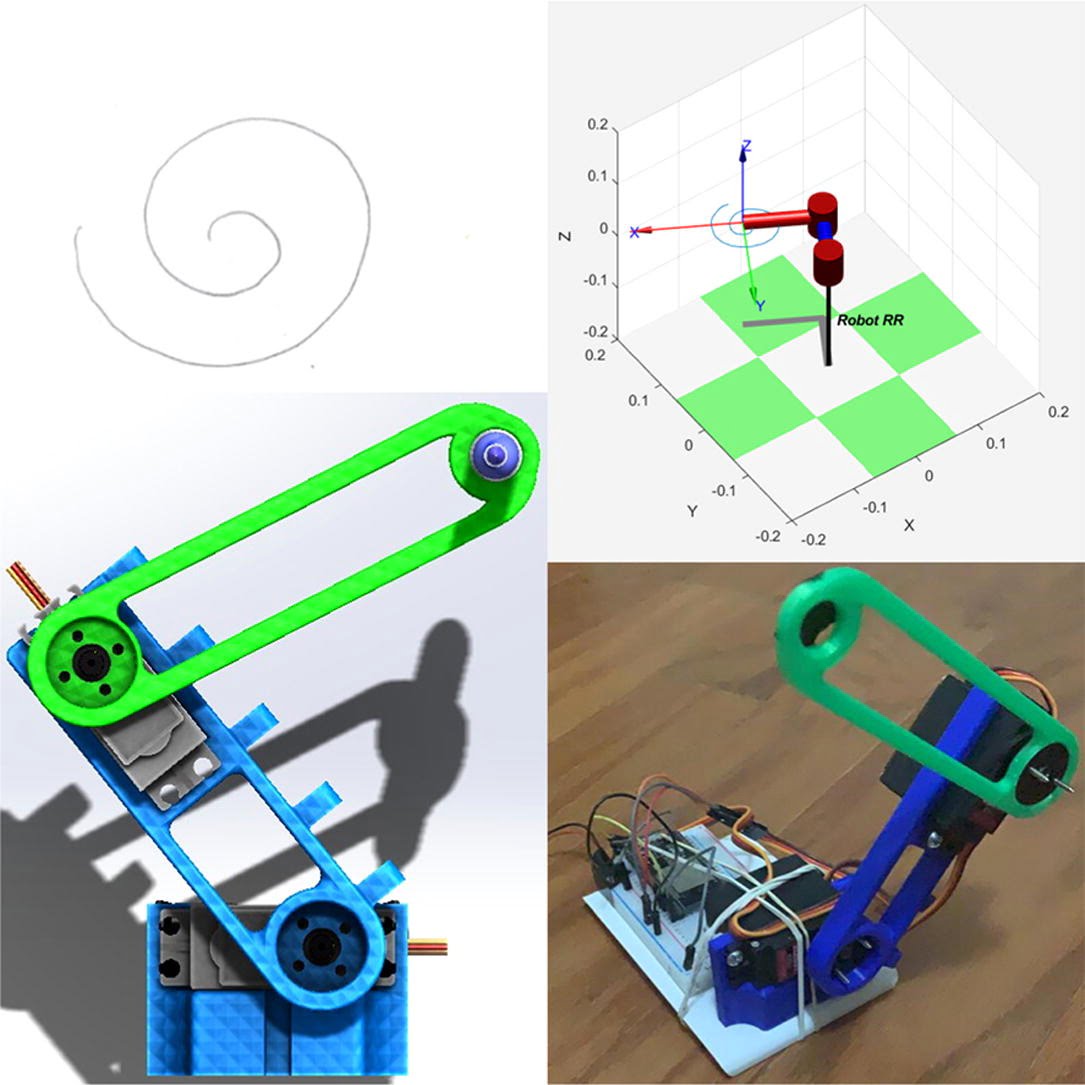
Benitez, “Robotik kolumuz kinematik adı verilen matematiksel bir işlem kullanıyor.” dedi. “Doğrudan kinematik, son efektörün konumunu belirlemek için istenen eklem açısı değerlerine sahip matrislerin kullanılmasından oluşur.
Denavit-Hartenberg algoritması
Bu davranışı robotta uygulamak için Denavit-Hartenberg algoritmasını kullandık. Öte yandan, dolaylı kinematik, esas olarak, uzayda belirli bir noktaya veya yörüngeye ulaşmak için son efektörün nasıl hareket etmesi gerektiğini hesaplamak için uzunluklar ve açılar arasında ilişkiler yaratan trigonometrik denklemlerdir.”
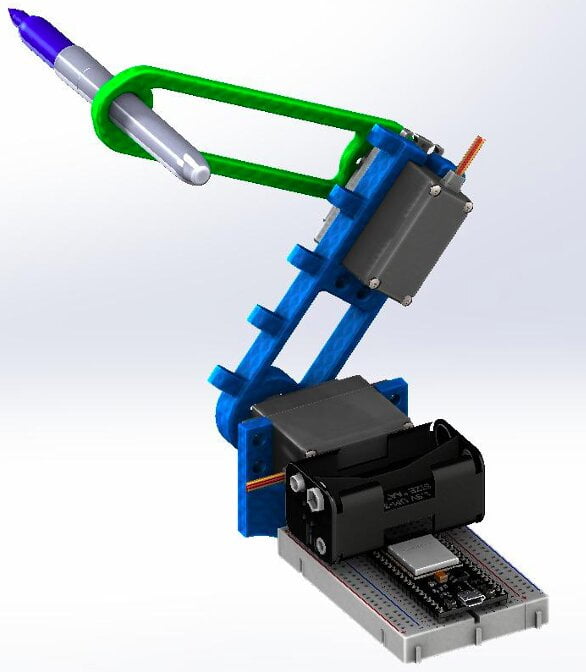
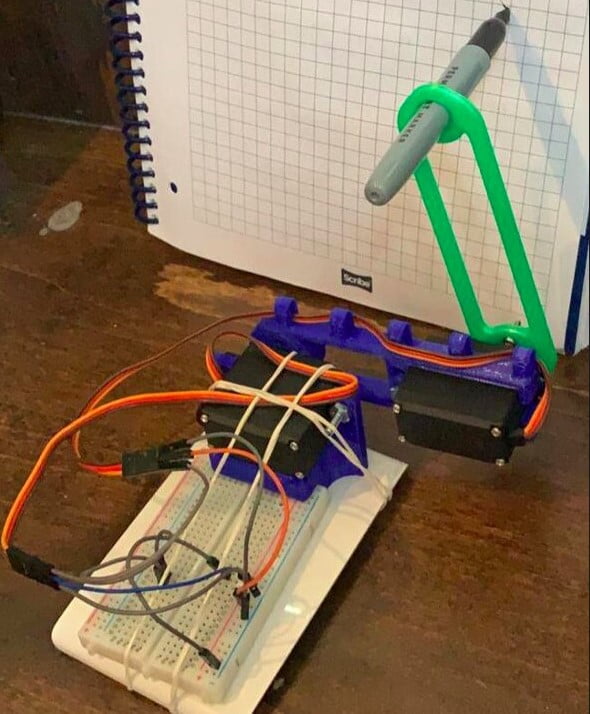
Bir robotik kolun bir uç efektörü (yani ilgili bir nesneyi) belirli bir yere hareket ettirmek için izlemesi gereken yörünge, belirli koordinatlar veya parametrik fonksiyonlar tarafından belirlenir. Bu bağlamda, uç efektör, bir işaret kalemi, bir lazer ve hatta bir robotik tutucu gibi kolun hareket ettirmeye çalıştığı herhangi bir nesne olabilir. (Makine mühendisliğinde, Denavit-Hartenberg parametreleri referans çerçevelerini bir uzamsal kinematik zincir veya robot manipülatörünün bağlantılarına bağlamak için özel bir kuralla ilişkili dört parametredir.)
Mevcut diğer robotik kolların aksine bu kolun üretim maliyetleri düşüktür. Ayrıca, WiFi kaynaklarına bağlanabilir ve çevrimiçi bir uygulama aracılığıyla uzaktan kontrol edilebilir. Bu, internet üzerinden iletişim kuran öğretmenlerin ve öğrencilerin aynı kolu denemelerine izin verdiği için uzaktan öğrenme için idealdir. Buna ek olarak, temel aldığı program, kullanıcıların kol hareketlerinin arkasındaki her komuta ve parametreye kolayca erişmesine olanak tanır. Ve bu da öğrenmeyi daha da destekleyebilir ve her öğrencinin bir robotun davranışının temelini oluşturan süreçleri anlamasına katkıda bulunabilir.
Robotik kolun dört ana bileşeni
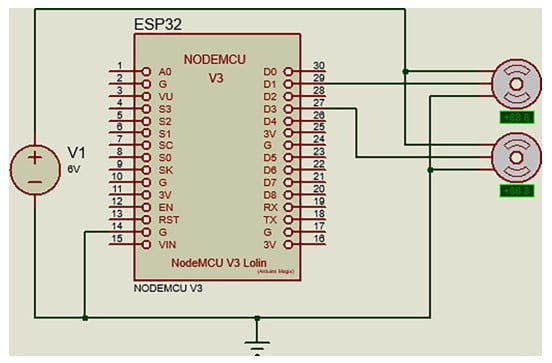
Robotik kolun dört ana bileşeni vardır: bir elektromekanik kol yapısı, bir kontrol sistemi, bir wi-fi iletişim modülü ve bir insan-makine arayüzü. Tamamen açık kaynaklıdır ve değiştirilebilir, yani dünya çapındaki eğitimciler tasarımına erişebilir ve özel ihtiyaçlarına göre uyarlayabilir. Öğretmenler bu kolu kullanarak birçok robotik kavramını gösterebilir. Ancak matematik, 3 boyutlu baskı, bilgisayar bilimi ve programlama ile ilgili diğer konulara da değinebilir.
Benitez, “Robotumuz tasarlamaya başlarken öncelikli amacımız eğitimde kullanılmasıydı ve öğrencilere faydalı olmasıydı.” dedi. “Eğitimciler, çevrimiçi eğitimin zorluklarıyla karşı karşıya kaldıklarında bile, öğrencilere derslerinde bahsedilen birçok konunun uygulamaları hakkında bilgi vermek için robotik kolu kolayca kullanabilir ve değiştirebilir.”
Benitez ve öğrencilerinin son çalışması, uygun fiyatlı elektronik bileşenler ve aktüatörler kullanarak kullanışlı ve verimli bir robot oluşturmanın mümkün olduğunu gösteriyor. Araştırmacılar robotik kollarını değerlendirdiklerinde, hem laboratuvar ortamında hem de uzaktan teorik kavramları göstermek için oldukça etkili bir araç olduğunu keşfettiler. Dünyanın her yerindeki eğitimciler, yakında öğrencilere çevrim içi olarak daha ilgi çekici yollarla öğretmek için kullanmaya başlayabilir ve dersler sırasında ele alınan teorik konuların somut örneklerini gösterebilir.
Benitez, “Şu anda, bir öğrenci ekibi bizim yardımımız ve önerilerimizle bu robotun ikinci bir versiyonunu geliştiriyor.” dedi. “Robota yükseltmeler uygulayacaklar ve avantajlarından (düşük fiyat, IoT entegrasyonu, eğitim amaçlı) ödün vermeden orijinal tasarımın performansını ve güvenilirliğini artıracaklar. Bu projenin birçok farklı şekilde kullanılmasını sağlamak için fiyat ve kullanışlılık arasında bir denge kurmayı amaçlıyoruz.”
Geliştirilen bu kolun öğrencilere oldukça faydası olacağı görülüyor. Robotik kolun uzaktan kontrol edilebilmesi öğrenci ve öğretmen arasındaki etkileşimini de arttıracaktır.
Utku Emre KOCAİBİŞ
Bu kaynağa tıklayarak robotik kol ile ilgili geniş çaplı çalışmaları görebilirsiniz.
Bir Makineyi Çizim Yapmak İçin Eğitmek
Bilmeniz Gereken 5 Farklı Makine Öğrenim Algoritması
Robotlar ve Yapay Zeka Neden Bizi Ürkütüyor?
C Programlama Dili Öğrenmek Size Nasıl Fayda Sağlayacak?
İçerisinde Gerçek İnsan Olan ve insan Gücüyle Çalışan Bilgisayar Nedir?




{kind=link}
Yorumlar 4