
İnsanlara çevrelerinde hareket etmelerine yardımcı olmak için eğitilmiş rehber köpekler, onlarca yıldır toplumda önemli bir rol aldılar. Aslında bu iyi eğitim almış hayvanlar, görme engelli bireyler için son derece önemli yardımcılar olduklarını kanıtladılar. Onlar sayesinde bu bireyler iç ve dış ortamlarda güvenli bir şekilde gezebildiler. California Üniversitesi Berkeley’in Hibrit Robotik Grubu’ndaki araştırmacılar, yakın zamanda rehber köpek rolünü üstlenebilecek tasması ile birlikte dört ayaklı bir robot ortaya çıkardılar.

ArXiv’de önceden yayınlanan bir makalede sunulan bu robot, insanların nesnelere, duvarlara ve diğer engellere çarpmadan kapalı ortamlarda güvenli bir şekilde gezinmesine yardımcı olabilir. Araştırmayı yürüten UC Berkeley Hybrid Robotics Group’ta araştırmacı olan Zhongyu Li, “İyi huylu bir rehber köpeğin genellikle her birey için özenle seçilmesi ve eğitilmesi gerekir,” dedi. “Ayrıca, bir köpeğin becerileri başka bir köpeğe aktarılamaz.
Bu, rehber köpekleri için hem zaman alıcı hem de yoğun emek gerektiren bir süreç olur ve kolayca ilerlenmesini engeller. Fakat bir robotik kılavuz köpek için geliştirilen algoritmalar kolaylıkla başka bir robota yerleştirilebilir.”
Dört ayaklı robotlar, son birkaç yılda giderek daha karmaşık hale geldi. Bu robotların çoğu aynı zamanda daha uygun fiyatlı hale geldi ve imal edilmesi büyük oranda daha kolay hale geldi. Dört ayaklı robotlar hem şekil hem de boyut olarak köpeklere benzediğinden, rehber köpekler için ideal yedek olabilirler ve insanların kabul etmesi diğer robotik sistemlere göre daha kolay olabilir.
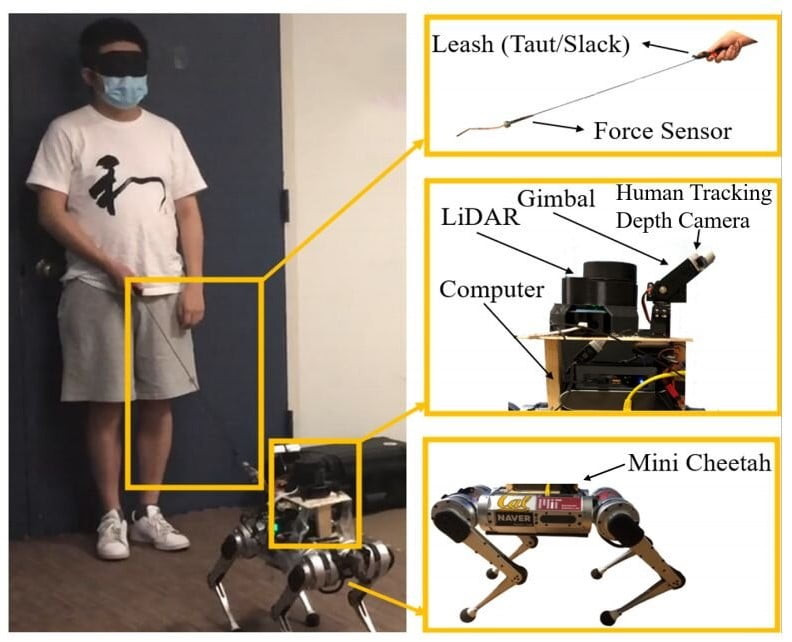
Li, “Görme engelli insanlar için dört ayaklı robotları kılavuz köpekler olarak kullanmaya karar verdik” dedi. “Rehber köpeğimiz, çevreyi algılamak için bir 2D LiDAR, hareket halindeki insanın konumunu izlemek için gimbal üzerinde bir kamera, insanlara kılavuzluk etmek için bir tasma ve insan tarafından veya insana uygulanan kuvveti ölçmek için tasma üzerinde bir kuvvet sensörü ile donatılmış Mini Cheetah adlı küçük bir dört ayaklı robottur. ”
Li ve meslektaşları, yeni robotik kılavuz köpeği üretmenin yanı sıra çalışma sırasında robotik köpek ile insan arasındaki iletişimi tanımlayan hibrit bir fiziksel insan-robot etkileşim modeli geliştirdiler. Bu modeli kullanarak, araştırmacılar daha sonra insanları sınırlı alanlarda en etkili şekilde yönlendirmek için gergin ve gevşek tasma modları arasında geçiş yapabilen reaktif bir planlayıcı geliştirdiler.

Li, “Örneğin, insana hizmet etmek için tasarlanan robot sistemi koridorun köşesi gibi dar bir alana girdiğinde robot ilk önce tasmanın gevşemesine izin verebilir” diye açıkladı. “Bu, robotun insanın yönünü doğrudan etkilemeden kendisini yeniden konumlandırmasını ve yeniden yönlendirmesini sağlıyor. Bununla birlikte robot, insanı bu sınırlı bölgede yönlendirmek için tasmanın gerilmesine izin verebilir. ”
Li ve meslektaşları, robotik rehber köpeğin, yakındaki engellerle kazalardan ve çarpışmalardan kaçınırken gözleri bağlı bir kişiyi belirli bir yere yönlendirmesi gereken bir dizi gerçek koşulda deney yaparak geliştirdikleri sistemi değerlendirdiler. Robot, katılımcıları herhangi bir çarpışma olmadan istenen konuma başarıyla yönlendirdiğinden, bu testlerin sonuçları oldukça ümit vericiydi. Araştırmacıların aynı zamanda bir sensör paketi ve yol planlama algoritmaları ile birlikte gelen robotik rehber köpeği, sonuçta kör bireylerin dağınık iç ortamlarda güvenli bir şekilde gezinmelerine yardımcı olabiliyor.
Li, “Tasma kullanımında robot-insan ekibini sınırlı alanlarda hareket ettirmek için tasmanın gergin / gevşek özelliklerini kullanan bir hibrit planlayıcı geliştirmemizi gerektirdi” dedi. “Şimdi robotik rehber köpeğimizin, insanların daha kalabalık dış ortamlarda gezinmesine ve ayrıca görme engelli kişilerin trafik ışıklarıyla karşılaştıkların da onlara yön göstermede yardımcı olmasını sağlamaya çalışıyoruz.”
Serra Nur Salim




{kind=link}